Wszystko w jednym
Wielofunkcyjny robot kartezjański z serii JC-3 jest wyposażony w łatwy w użyciu dedykowany kontroler i jednostkę robota z dużym wyborem długości skoku napędu liniowego dla każdej osi.
Podobnie jak nasze roboty stołowe, JC-3 ma wygodne ustawienia instalacyjne. Programowanie jest łatwe; dzięki interaktywnej metodzie nauczania nie ma potrzeby wprowadzania skomplikowanych ustawień.
Idealny jako liniowy robot dozujący lub dokręcający śruby
Nasze wyspecjalizowane oprogramowanie do specyfikacji dozowania lub dokręcania śrub znacznie skraca czas programowania. Oferujemy również bardzo wszechstronne oprogramowanie ze standardową specyfikacją.
Wykorzystuje odpowiednie silniki, aby spełnić potrzeby wymagających Klientów
Seria JC-3 wykorzystuje silniki krokowe ze sprzężeniem zwrotnym na osiach X i Y do przenoszenia obciążenia do 8 kg, z maksymalnym przyspieszeniem 5000 mm/s2 i maksymalną prędkością 800 mm/s.
Wszechstronne interfejsy
Standardowe wyposażenie obejmuje port Ethernet (LAN) i 3 porty COM (RS2323C). Opcjonalnie dostępne interfejsy Fieldbus (typy: CC-Link, DeviceNet, PROFIBUS, EtherNet/IP, PROFINET i CANopen).
Dzięki nim można nie tylko określić numer programu i uruchomić go ze sterownika PLC, ale także określić współrzędne pozycji i przesunąć osie robota, a także przepisać współrzędne pozycji w istniejących programach.
Wysoka kompatybilność z instalacją systemu wizyjnego
Udoskonalone funkcje kamery dostosowane do potrzeb zakładów montażowych dążących do większej precyzji.
Oprócz naszej pomocnej funkcji korekcji położenia, dodaliśmy takie funkcje, jak funkcja automatycznej kalibracji i funkcja regulacji kamery CCD.
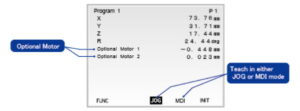
Sterowanie dodatkowymi 2 silnikami zewnętrznymi za pomocą funkcji osi pomocniczej (opcjonalnie)
Możliwe sterowanie dodatkowymi dwoma silnikami krokowymi lub serwomotorami napędzanymi „wejściem typu ciąg impulsów” wraz z osiami standardowymi robota. Funkcja ta ma wiele zastosowań, takich jak dodanie stołu obrotowego w celu zmiany kierunku przedmiotu obrabianego lub skonfigurowanie i sterowanie przenośnikiem z robota itp.
Łatwe pisanie programów
Programowanie odbywa się z poziomu programatora za pomocą ruchu JOG.
Korzystając z naszego dedykowanego oprogramowania komputerowego „JR C-Points II”, nauczanie jest łatwe zarówno dla „Specyfikacji dozowania”, jak i „Specyfikacji dokręcania śrub”. Dane dydaktyczne można również tworzyć w oparciu o pliki DXF lub dane Gerber.
Nie wymaga mechanicznej inicjalizacji, powrotu do 0,0,0 (model z enkoderem)*1)
Korzystając z enkodera absolutnego, robot zapamiętuje swoją bieżącą pozycję. Ruchy zerujące między przebiegami programu są zbędne.
*1 Model enkodera absolutnego jest dostępny tylko dla typów 3-osiowych.
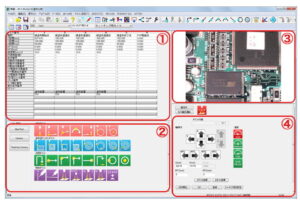
Oprogramowanie systemowe
Przyjazne zarówno dla początkujących, jak i doświadczonych operatorów, nasze oryginalne oprogramowanie systemowe jest zainstalowane w robocie.
Nasze dedykowane oprogramowanie do konkretnych zastosowań sprawia, że nauka obsługi robota jest łatwa nawet dla nowych użytkowników; jeszcze bardziej rozbudowaliśmy naszą grupę poleceń, aby zapewnić większą różnorodność poleceń do wykorzystania.
Automatyczna kalibracja z użyciem kamery
Dobra wiadomość dla klientów, którzy chcą używać systemu wizyjnego do regulacji pozycji! Kalibracja kamery, niegdyś czasochłonny proces dopasowywania współrzędnych kamery do współrzędnych robota, jest teraz znacznie łatwiejsza. Wystarczy zarejestrować znaczniki kalibracji po stronie kamery, a robot skalibruje się automatycznie.
Kompatybilne kamery*2
Panasonic A110・A210、PV200・PV260・PV300・PV500
Keyence CV3000・CV-X100・CV-X200・CV-X400、XG-8000・Seria XG-X
Seria OMRON FH・ Seria FQ
*2 Niektóre modele kamer zostały wycofane z produkcji. Szczegółowe informacje można uzyskać u producenta.
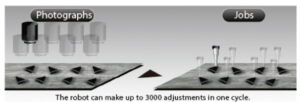
Funkcja regulacji kamery CCD z licznikiem
Ulepszyliśmy funkcje zadań wykonywanych podczas korzystania z kamery do regulacji położenia. Robot może zarejestrować do 3000 korekt położenia, więc w przypadku elementów ustawionych w rzędzie na palecie, zamiast powtarzać proces przechwytywania obrazu, a następnie wykonywania zadania po jednym elemencie na raz, można przechwycić partię sekwencyjnych obrazów, a następnie wykonać partię zadań sekwencyjnie i znacznie skrócić całkowity czas taktu.
Wspólne ustawienia dla wszystkich programów
Ustawienia takie jak „praca w domu”, „limit obszaru ruchu”, „warunki ruchu PTP” itp., które są takie same dla wszystkich programów, można teraz skonfigurować wspólnie. Dokonanie tych ustawień raz dla wszystkich programów pomaga skrócić czas nauki programu. Oczywiście, jeśli chcesz, możesz przełączyć te ustawienia, aby ustawić je indywidualnie.
4-osiowa funkcja regulacji igły
Robot rejestruje pozycję końcówki dyszy dozownika, więc jeśli podczas wymiany igły wystąpi rozbieżność pozycji, robot używa funkcji „Needle Adjuster” do określenia wielkości przesunięcia i dostosowania pozycji końcówki dyszy, umożliwiając dozowanie w taki sam sposób, jak przed wymianą igły. Oprócz naszego typu 3-osiowego, funkcja ta działa teraz również dla naszych typów 4-osiowych. Zdecydowanie zalecamy tę funkcję klientom, dla których regulacja położenia dyszy po wymianie igły jest uciążliwa.

Historia błędów
Na wyświetlaczu pojawiają się czasy i daty błędów.
Robot określa czas wystąpienia błędu, pomagając zidentyfikować jego przyczynę.
Historia błędów zapisuje dane dla ostatnich 1000 błędów.
Prosta funkcja PLC
Wbudowany prosty sekwencer umożliwia robotowi łatwą samodzielną koordynację z urządzeniami zewnętrznymi. (Maksymalna pojemność 100 programów z 1000 kroków na program).
Uczenie z kamery USB
Precyzyjne uczenie jest łatwe! Podłącz kamerę USB* i ustaw punkty za pomocą powiększonych obrazów na ekranie komputera, klikając ikony odpowiednich ruchów.
*Aby uzyskać informacje na temat kompatybilnych kamer USB, skontaktuj się z nami.









