Dodatkowe funkcje konserwacji robota
Rejestr danych roboczych robota służy jako wskazówka, kiedy należy przeprowadzić konserwację lub wymienić części eksploatacyjne.
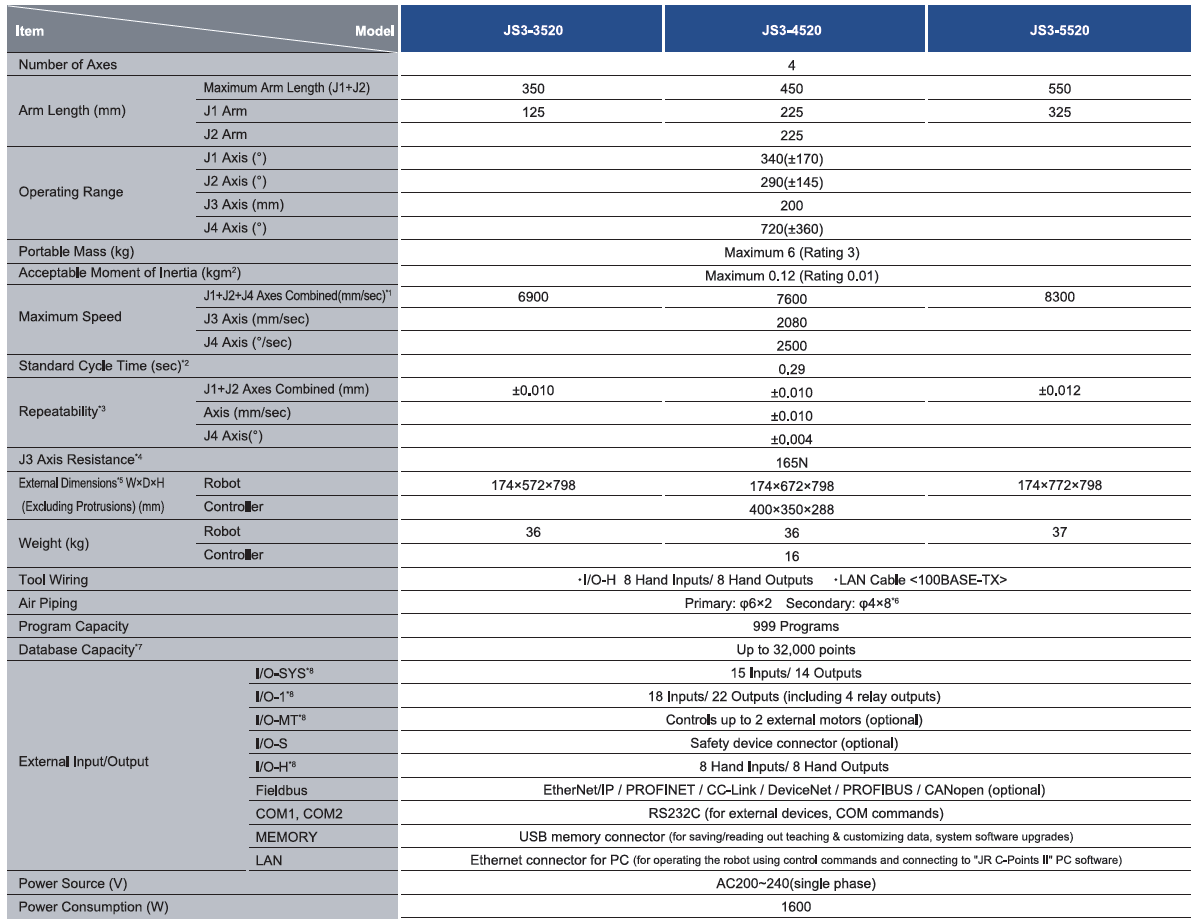
Wszechstronne interfejsy zewnętrzne
Port LAN (Ethernet), port pamięci USB, 6 opcji Field Network, możliwość dodania do 2 opcjonalnych osi pomocniczych.
Tworzenie programów jest łatwe
Skorzystaj z naszego oryginalnego oprogramowania na komputery PC lub Programatora (TP2).
Wbudowana funkcja prostego sterownika PLC
Obsługuje prostą komunikację z urządzeniami zewnętrznymi; nie wymaga zewnętrznego sterownika PLC.
Wielojęzyczna kompatybilność
Możliwość przełączania między 5 językami wyświetlania za pomocą naszego oprogramowania PC i 11 językami wyświetlania na naszym programatorze.